3D測量一連の流れ(3Dレーザースキャナー)
1.踏査選点
3D測量を行ううえで、測量範囲の全てを補えるように基準点を選点し、また基準点が流失しないように動かないように設置する。

2.基準点測量
現地において、トータルステーションを用いて選点した箇所の測量を行い、座標値を計測する。

3.レーザースキャナー測量
基準点測量で計測した箇所を3Dレーザースキャナーで測量を行います。計測精度としては点の大きさを6.3mmの詳細モードで測量を行います。
詳細モードでは最長150mまで点を飛ばし計測します。また、1点を測量するのに約8分~10分かかります。測量点が20点を超える場合は、測量のみで2日かかる場合がある。
注意として、川底などのレーザー測量はレーザーが反射して測定不可。また、雨などの日もレーザーの反射・屈折で一部測量値がずれる恐れがあります。
3Dレーザースキャナーの設定についてはこちら

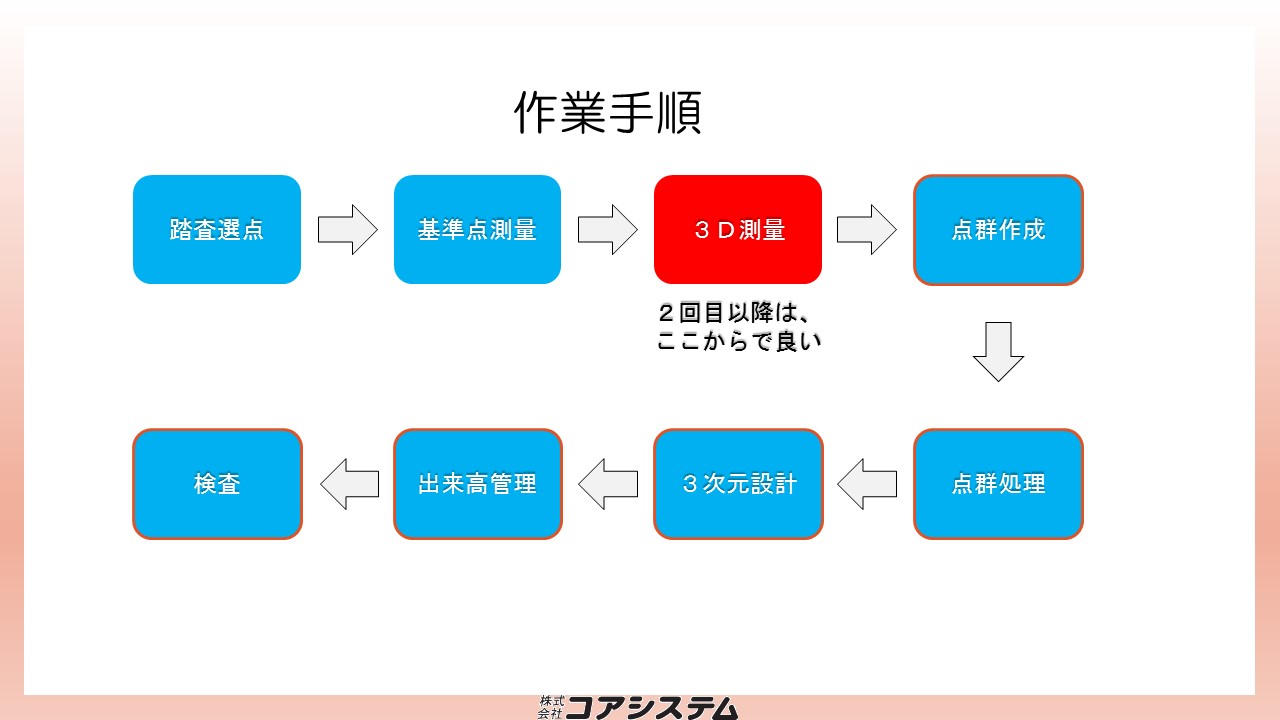
4.点群作成
測量したデータはTPCO製品「MAGNET Collage」を使用し、点群を作成します。
それぞれの測量データに座標を読込み、地形が完成すると複数の測量データを1つにまとめます。
また、点群データにカラーマッピング(写真の合成)することで、点群に色が配色されより鮮明な点群データが作成できます。
次に、点群を他ソフトでも開けるように出力を行います。
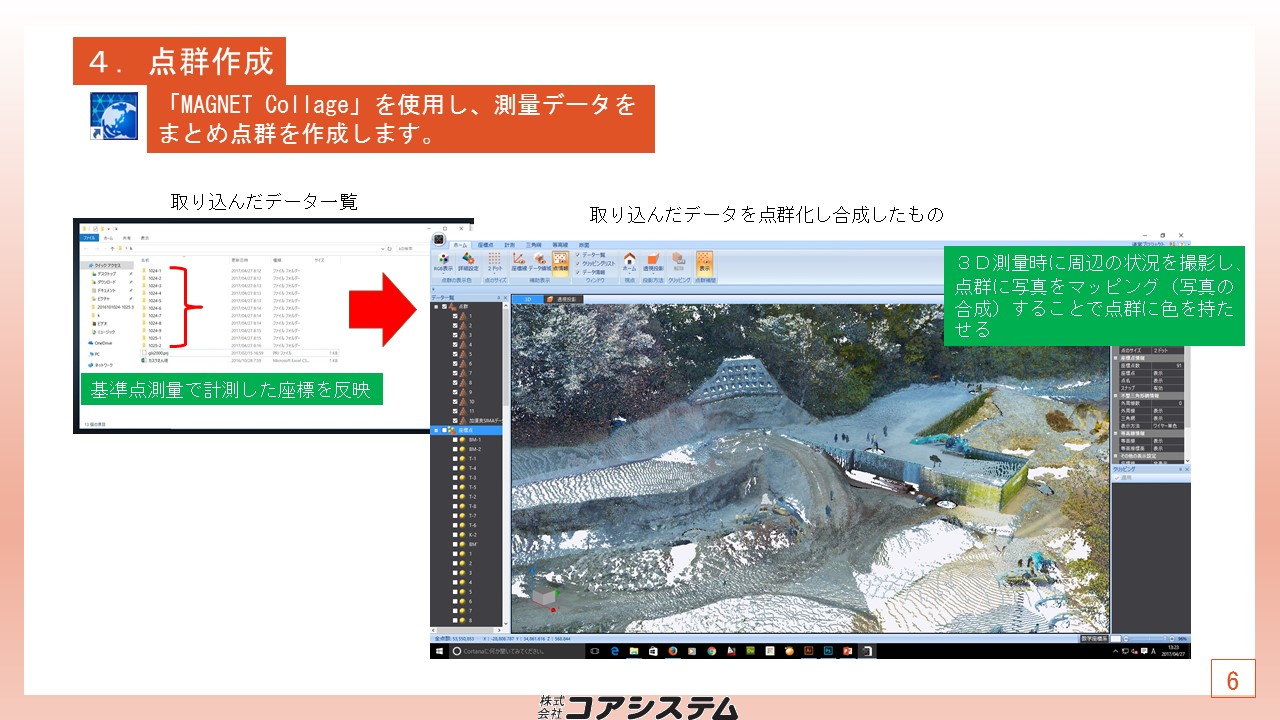
5.点群処理
使用ソフトは「TERND-POINT」「LandForms」
点群のフィルタリング(木や人物、車等の不要な点の削除)し、地表面だけの点群を作成する。
地表面のみの点群になったら点群に面(メッシュ)を張ります。

面を張ることでメッシュ土量計算、コンクリートボリューム計算なども可能。1回測量した後に、2回3回と測量してその差分も計測が可能